Errendimendua optimizatzea MPU-6050-rekin: konfigurazioa, kalibrazioa eta aplikazioak
2024-04-25
9233
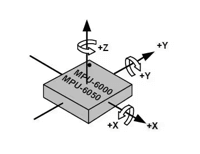
MPU-6050 Munduko 6 ardatzek prozesatzeko osagai integratua da.Erabiltzeko helburua da x, y eta z ardatzetan neurtu beharreko objektuaren inklinazio angelua (esaterako, orekagarria, orekatzeko autoa), hau da, pitch angelua, biribila angelua eta uzteko angelua.MPU-6050 (hiru ardatzetako azelerazioaren iragarkiaren balioa eta hiru ardatz angeluarreko iragarkiaren balioa) irakurri ditugu I2C interfazearen bidez.Posturaren fusioaren prozesamendua, zelaia, erroilua eta ur-angeluak kalkulatu ondoren kalkulatu daitezke.Neurketa-balioetarako norabide erreferentzia gisa, sentsorearen koordenatuen norabidea zehaztea beheko irudian erakusten den bezala da, eskuineko koordenatuen sistemaren printzipioa jarraitzen duena (hau da, eskuineko hatzak X- norabide positiboan seinalatzen du.Ardatzak, hatz erakusleak Y-ardatzaren norabide positiboan seinalatzen du eta erdiko hatzak Z-ardatzaren norabide positiboa adierazten du. Zuzendaritza).
Katalogo
I2C sentsorearen autobus dedikatuarekin, MPU-6050-ek sarrerako 3 ardatz iparrorratzatan zuzenean jasotzeko gai da, 9 ardatzetako MotionFusion ™ irteera osoa eskainiz.Giroskopio konbinatuaren eta azeleragailuaren kronogramaren arteko desadostasun arazoa ezabatzen du eta ontziratze espazioa nabarmen murrizten du osagai anitzeko soluzioekin alderatuta.Hiru ardatzetako magnetometro batera konektatzean, MPU-60x0-ek 9 ardatzetako mugimendu fusioaren irteera osoa emateko gai da I2C edo SPI portu nagusira (ohartu SPI portua MPU-6000 bakarrik dagoela bakarrik eskuragarri dagoela).
Alternatibak eta baliokideak
- Mpu-3300
- MPU-6000
- MPU-6500
MPU-6050 fabrikatzailea
MPU-6050 fabrikatzailea TDK da.TDK-ko bi sortzaileen ondoren, Yogoro Kato eta Takei Takei doktoreak Ferritak asmatu zuen Tokion, Tokyo Denkikaku K.k.k sortu zuten.1935. urtean Elektronika Industrial Global gisa, TDK-k beti mantendu du lehengai eta osagai elektronikoen arloetan nagusi den posizioa.TDK-k produktu-zorroak osagaiak eta berrikuntzak ditu, hala nola, zeramikazko kondentsadoreak, aluminiozko kondentsadore elektrolitikoak, zinema-kondentsadoreak, produktu magnetikoak, maiztasun handiko osagaiak, piezoelektriko eta babes gailuak, baita tenperatura eta sentsore sistemak ere (tenperatura eta presioa ere)Magnetiko eta MEMS sentsoreak) eta abar, gainera, TDK-k energia hornidura eta energia-gailuak, buru magnetikoak eta bestelako produktuak ere eskaintzen ditu.Bere produktuen markak TDK, EPCOS, Invensese, Micronas, Tronics eta TDK-Lambda dira.
MPU-6050 barruko blokearen diagrama
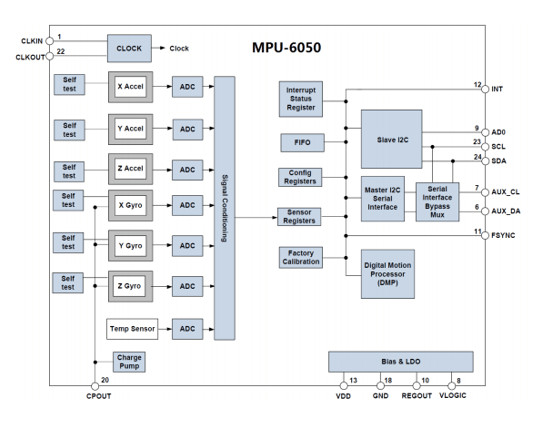
Horien artean, SCL eta SDA MCUrekin lotutako iIC interfazeak dira, eta MCUk MPU-6050 kontrolatzen du IIC interfaze honen bidez.IIC interfazea ere badago, hots, aux_cl eta aux_da.Interfaze hau kanpoko esklabo gailuak konektatzeko erabil daiteke, esate baterako sentsore magnetikoak, bederatzi ardatz sentsore bat osatzeko.Vlogic IO portuko tentsioa da.PIN honek gutxienez 1,8V onartzen ditu.Normalean zuzenean VDD-ra konektatzen dugu.AD0 IIC interfazearen esklabuen helbidearen kontrolaren PINa da (MCUrekin lotuta).Pin honek IIC helbide txikiena kontrolatzen du.GND-rekin konektatuta badago, MPU-6050-ren IIC helbidea 0x68 da;VDD-rekin konektatuta badago, 0x69 da.Kontuan izan hemen helbideak ez duela datuen transmisiorik txikiena (txikiena irakurtzeko eta idazteko eragiketak ordezkatzeko erabiltzen da).MWBalancedstc15-en, AD0 GND-rekin konektatuta dago, beraz, MPU-6050 helbidearen IIC helbidea 0x68 da (bit baxuena kenduta).
IIC interfazea hasieratu
MPU-6050 IIC erabiltzen du STC15-ekin komunikatzeko, beraz, SDA eta SCL datu-lerroak MPU-6050-ra konektatu behar ditugu lehenik.
Berrezarri mpu-6050
Urrats honek MPU-6050 barruan erregistro guztiak lehenetsitako balioak lehenetsitako balio ditu, 1 (0x6b).Berrezarri ondoren, Power Management Register 1 lehenetsitako balioa lehenetsiko da (0x40), eta erregistro hau 0x00-en ezarri behar da MPU-6050 esnatzeko eta lan estatu normaletan jarri behar da.
Ezarri abiadura angeluko sentsorearen (gyro) eta azelerazio sentsorearen eskala osoa
Urrats honetan bi sentsoreen eskala osoko (FSR) ezartzen dugu Gyroskopioaren Konfigurazio Erregistroaren bidez (0x1b) eta Azelerazio Sentsorearen Konfigurazio Erregistroaren bidez (0x1c) hurrenez hurren.Normalean, giroskopioaren eskala osoaren tartea ± 2000DPS eta azelerometroaren eskala osoko tartea ± 2G-ra ezartzen dugu.
Ezarri beste parametroak
Hemen, honako parametro hauek ere konfiguratu behar ditugu: desaktibatu etenak, desaktibatu aux i2c interfazea, desgaitu FIFO, ezarri gyroskopoaren laginketa tasa eta konfiguratu Pass Tarifa Digitala (DLPF).Kapitulu honetan datuak irakurtzeko etenik ez dugunez, eten-funtzioa desaktibatu behar da.Aldi berean, AUX i2c interfazea erabiltzen ez dugunez kanpoko beste sentsore batzuk konektatzeko, interfaze hori ere itxi behar dugu.Funtzio horiek eten dezake eten gaitzeko erregistroaren bidez (0x38) eta erabiltzaileen kontrol-erregistroa (0x6a).MPU-6050ek FIFO erabil dezake sentsoreen datuak gordetzeko, baina ez dugu kapitulu honetan erabili, beraz, FIFO kanal guztiak itxi behar dira.Hori FIFO Gaitu Erregistroaren bidez (0x23) kontrolatu daiteke.Berez, erregistro honen balioa 0 da (hau da, FIFO desgaituta dago), beraz, balio lehenetsia zuzenean erabil dezakegu.Giroskopioaren laginketa tasa laginketaren tasa banatzailearen erregistroa (0x19) kontrolatzen da.Normalean, laginketa-tasa hau 50era ezarri dugu. Pasabide baxuko iragazki digitalaren (DLPF) konfigurazio erregistroaren bidez osatzen da (0x1a).Orokorrean, DLPF banda zabaleraren erdia ezarriko dugu datuen zehaztasuna eta erantzunaren abiadura orekatzeko.
Konfiguratu sistemaren erlojuaren iturria eta gaitu abiadura angeluko sentsore eta azelerazio sentsorea
Sistemaren erlojuaren iturria ezarpena potentzia kudeaketaren erregistroaren araberakoa da 1 (0x6b), non erregistro honetako hiru bit baxuenak zehazten duten erlojuaren iturriaren aukeraketa.Lehenespenez, hiru bit hauek 0 ezarrita daude eta horrek esan nahi du sistemak 8MHZ RC osziladorea erabiltzen duela erlojuaren iturri gisa.Hala ere, erlojuaren zehaztasuna hobetzeko, sarritan 1-ra ezartzen dugu eta X ardatza Gyroskopio PLL aukeratu erlojuaren iturri gisa.Gainera, abiadura angeluko sentsorea eta azelerazio sentsorea ahalbidetzea ere urrats garrantzitsua da hasierako prozesuan.Bi eragiketak Power Management Register 2-ren bidez (0x6c) bidez gauzatzen dira.Besterik gabe, ezarri dagokion bit 0 dagokion sentsorea aktibatzeko.Aurreko pausoak bete ondoren, MPU-6050ak lan egoera normala sar dezake.Bereziki ezarritako erregistro horiek sistemak aurrez zehaztutako balio lehenetsiak hartuko ditu.
Nola funtzionatzen du MPU-6050?
Gyro sentsorea
Sentsorea giro barruan dago, beti hasierako norabidean paraleloan geratuko da efektu giroskopikoa dela eta.Hori dela eta, biraketa norabidea eta angelua kalkulatu ditzakegu Gyroren desbideratzea hasierako norabidean detektatuz.
Azelerometro sentsorea
Azelerometroaren sentsorea azelerazioa neurtzeko gai den gailua da eta efektu piezoelektrikoaren printzipioan oinarritzen da.Azelerazioan zehar, sentsoreak masa-blokean aplikatutako indar inertziala neurtzen du eta ondoren, Newtonen bigarren legea erabiliz azelerazio balioa kalkulatzen du.
Mugimendu digitaleko prozesadorea (DMP)
DMP DBS prozesatzeko modulua da MPU6050 Chip-en, Kalman iragazketa algoritmoa duen, giroskopioaren eta azelerometroko sentsoreen datuak eskuratzeko eta irteerako kuaternoak prozesatzeko.Ezaugarri honek asko murrizten du mikroprozesadore periferikoaren lan karga eta iragazketa eta datuen fusio prozesua saihesten ditu.
Oharrak:
Kuaternoak: Kuaternioak zenbaki supercomplex sinpleak dira.Zenbaki konplexuak zenbaki errealez osatuta daude eta i irudizko unitatea i, non ^ 2 = -1.
Non erabiltzen da mpu-6050?
- Jostailuak
- Telefonoa eta joko eramangarria
- Mugimenduan oinarritutako joko kontroladoreak
- Blurfree ™ teknologia (bideo / oraindik irudien egonkortzeagatik)
- Airsign ™ teknologia (segurtasun / autentikaziorako)
- InstantGesture ™ IG ™ Keinu-aitorpena
- Osasun, fitness eta kiroletarako sentsore eramangarriak
- Mugimendua gaitutako joko eta aplikazioen esparrua
- MotionCommand ™ teknologia (Keinu motzak egiteko)
- Kokapenean oinarritutako zerbitzuak, interesguneak eta hildakoak kontutan hartzen dituzte
- Interneteko konektatutako DTV-rako 3D urruneko kontrolak eta ezarri goiko koadroak, 3D saguak
- Touchanywhere ™ teknologia (ez da ukitu "UI aplikazioaren kontrola / nabigazioa)
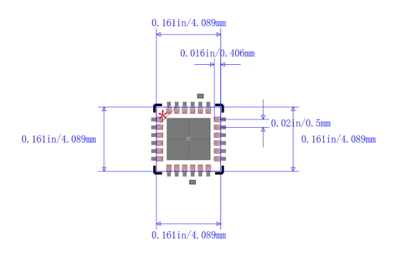
MPU-6050 paketea
Nola murriztu MPU-6050 zarata?
MPU-6050 zarata murrizteko modu hauek har ditzakegu.
Erabil itzazu kalibratutako sentsoreak
MPU-6050-en azelerometroa eta giroskopiak kalibratzeak sentsoreen beraiek ezabatzea eta akatsa ezabatu ditzake, beraz, zarataren eragina murrizten da.Kalibrazio prozesua normalean bi fasek osatzen dute: kalibrazio estatikoa eta higidura kalibrazioa.
Hardware iragazketa prozesua
MPU-6050-en iragazki-kondentsadoreak gehitzeak sentsorearen gaineko energia horniduraren zarataren eragina murriztu dezake.Bien bitartean, PCB diseinuan, MPU-6050 interferentzia iturri potentzialetatik urruntzen saiatu beharko genuke, adibidez maiztasun handiko seinale-lerroak eta potentzia handiko osagaiak.
Softwarea iragazteko prozesamendua
MPU-6050-ren datu gordinak bildu ondoren, softwarea iragazteko esteka gehitu dezakegu hasierako datuak aurrez prozesatzeko, zarata eragindako interferentziak ezabatzeko.Normalean erabilitako software iragazketa metodoak batez besteko iragazkiak, mediana iragazkiak, Kalman iragazkiak eta abar daude.
Erabili barneko iragazki baxua
MPU-6050-ek barne-baxuko iragazki digital integratua du, maiztasun handiko zarata murrizteko erabil daitekeela, bere maiztasuna ezarriz.Zehazki, iragazki digitalaren ebakidura maiztasuna ezar dezakegu MPU-6050-ren konfigurazio-erregistroa aldatuz A / D laginak eragindako maiztasun handiko zarata kentzeko.
MPU-6050 oinarritutako mugimenduaren kalkulua
MPU-6050 sei ardatzetako azelerometroa eta giroskopio sentsorea da, objektuen higidura eta jarrera neurtzeko erabil daitekeena.MPU-6050-en oinarritutako mugimenduaren ibilbidearen kalkulua honako pauso hauek egin daitezke:
Lehen urratsa sentsoreen datuak irakurtzea da.Azelerometroa eta gyroskopoaren datuak MPU-6050 sentsoreetatik irakurri behar ditugu gidari eta liburutegi funtzio egokiak erabiliz.Datu horiek normalean formatu digital batean irteerak izaten dira, beraz, bihurketa eta kalibrazio lan batzuk behar dira unitate fisikoetan benetako neurketak bihurtzeko.
Bigarren urratsa azelerazioa kalkulatzea da.Lehenik eta behin, azelerometrotik datuak tratatu behar ditugu ardatz bakoitzean objektuaren azelerazioa lortzeko.Ondoren, ardatz bakoitzean objektuaren abiadura eta desplazamendua kalkulatzeko, azelerazio datuak integratu behar ditugu.Integrazio zenbakizko teknikak, hala nola Eulerren metodoa edo Lunger-Kutta metodoa, askotan erabiltzen dira prozesu honetan desplazamendu kalkuluen zehaztasuna bermatzeko.
Hirugarren urratsa abiadura angeluarra kalkulatzea da.Giroskopioko datuak erabiliz, ardatz bakoitzean objektuaren abiadura angeluarra kalkulatu daiteke.Berriz ere, datu horiek kalibratu egin behar dira eta bihurtu behar dira unitate fisikoetan abiadura angeluarra lortzeko.
Laugarren urratsa biraketa kalkulatzea da.Abiadura angeluko datuak integratuz, ardatz bakoitzean objektuaren biraketa angelua kalkulatu daiteke.Hau integrazio zenbakizko teknikak erabiliz egin daiteke, hala nola Eulerren metodoa edo Longe-Kutta metodoa angelua kalkulatzeko.
Bosgarren urratsa datuak bateratzea da.Datuak azelerometroetatik eta giroskopioetatik konbinatzen ditugu objektuaren jarrera osoa eta kokapenari buruzko informazioa lortzeko.Hori egin daiteke, hala nola, kuaternion oinarritutako jarrera konpontzailea edo Euler angeluko ebazlea.
Seigarren urratsa emaitzak ikustea da.Konputatutako objektuen mugimenduaren ibilbidea 3D koordenatu-sisteman puntu multzo batean bihurtzen dugu eta bistaratzeko tresna egokiak erabiliz bistaratzen ditugu objektuaren mugimenduaren ibilbidea eta jarrera aldaketak ulertzeko.
Galdera arruntak [FAQ]
1. Zein da zehatza mpu6050?
Eskuratutako emaitzek% 1 baino gutxiagoko zehaztasuna eta fidagarritasuna izan zituzten, igogailuaren ardatzaren eta igogailuaren estandar altuen dimentsionamendu egokia ziurtatuz.
2. Nola irakurri MPU6050-en datuak?
Barne MPU6050 erregistroak irakurtzeko, maisuak hasiera-egoera bidaltzen du, eta ondoren I2C esklabo helbidea eta idatzizko bit bat eta, ondoren, irakurri beharko den erregistroaren helbidea.
3. Non erabiltzen da mpu6050?
Erabilerarako osasun-jarraipenean, egokitasun-jarraipen gailuak.Dronetan eta kuadriletan, MPU6050 posizio kontrolerako erabiltzen da.Beso robotikoa kontrolatzeko erabiltzen da.Eskuz Keinu Kontrolerako Gailuak.
4. MPU6050 imu da?
MPU6050 IMU sentsore blokeak hardwarearekin konektatuta dagoen MPU-6050 sentsorearen datuak irakurtzen ditu.Blokeak azelerazioa, angelu tasa eta tenperatura sentsorearen ardatzetan ateratzen ditu.
5. Zein da MPU6050 prozesatzea?
Hau da, azelerometrotik eta giroskopiotik datozen datuak uztartzen dituen MPU6050-en itsasontziko prozesadorea da.DMP MPU6050 erabiltzeko gakoa da eta xehetasunez azaltzen da gero.Mikroprozesadore guztiekin gertatzen den bezala, DMPk firmwareak behar ditu korrika egiteko.
Funtzio proba.Produktu errentagarrienak eta zerbitzu onena da gure betiko konpromisoa.
Artikulu beroa
- CR2032 eta CR2016 truka daitezke
- MOSFET: Definizioa, lan printzipioa eta hautaketa
- Erreleboen instalazioa eta probak, errelebo kableen diagramak interpretatzea
- Cr2016 vs. cr2032 Zein da aldea
- NPN vs. PNP: Zein da aldea?
- ESP32 vs STM32: Zein mikrokontroladore hobea da zuretzat?
- LM358 bikoitzeko anplifikadore bikoitzeko gida integrala: pinutsak, zirkuituaren diagramak, baliokideak, adibide erabilgarriak
- CR2032 VS DL2032 vs CR2025 konparaziorako gida
- Desberdintasunak ulertzea ESP32 eta ESP32-S3 azterketa teknikoa eta errendimendua
- RC serieko zirkuituaren azterketa zehatza
 NRF24L01 komunikazio txiparen gaitasunak eta aplikazioak arakatzea
NRF24L01 komunikazio txiparen gaitasunak eta aplikazioak arakatzea
2024-04-25
 Mmbt3904 NPN Transistor: haren zehaztapenak, aplikazioen gida integrala eta MMBT3904 vs. mmbt5551
Mmbt3904 NPN Transistor: haren zehaztapenak, aplikazioen gida integrala eta MMBT3904 vs. mmbt5551
2024-04-25
Zatien kopurua
 GRM32ER72A225KA35K
GRM32ER72A225KA35K CC1206JRNPO0BN471
CC1206JRNPO0BN471 CC0805ZRY5V9BB473
CC0805ZRY5V9BB473 1808GC152KATBE
1808GC152KATBE GRM2166T1H201JD15D
GRM2166T1H201JD15D F971C226MNC
F971C226MNC TPSX107K010R0200
TPSX107K010R0200 ICS552G-02I
ICS552G-02I ATF22V10C-15SC
ATF22V10C-15SC RT0603BRD07680KL
RT0603BRD07680KL
- AT89C4051-24SI
- MAX355EWE
- EL5411IRE
- ACS713ELCTR-30A-T
- CRCW06034R02FKEA
- VI-230-IU
- MC74ACT240DTR2G
- SN74HC4020PW
- TCA9555DBR
- MC74VHC139DTR2
- TPS71750DSER
- AD9804AJSTZ
- BVSS123LT1G
- TLV5618AQD
- AD5554BRS
- AM29LV400BB-70SE
- HC3-55564-5
- IRF7604PBF
- JM38510/11001BCA
- LA72710V-TLM-E
- LT1130CS
- M30302GDP-063FP
- MAX5079EUD
- MAX820TESE
- MC68331CPV25
- OB3309QPA
- P3041PSE1PZA
- TZA1029H
- Z8018100FEG
- B54C3256404VAB
- N82C55A-2
- PW168A-10V-M
- SP8-24A02G-T
- SC667353DC
- CXD4120AGG
- SST49LF002A
- BC59355A2IUB3GT
- CY62157CV33BAI
- WR08X1204FTL